 1.10.2011 |
1.10.2011 |
Následující text je určen pro začínající uživatele řádkových kamer nebo pro ty, kteří se o této technologii chtějí dozvědět základní informace. Článek srovnává použití klasické plošné kamery a řádkové kamery a upozorňuje na specifika spojená s použitím těchto kamer. Na konci článku jsou uvedeny nejběžnější typy řádkových kamer včetně odkazů na konkrétní typy z produkce firem Basler a JAI.
Zkrácená podoba článku byla uveřejněna v časopise ![]()
Co je řádková kamera?
 Řádková kamera obsahuje snímací CCD/CMOS čip s jediným nebo několika málo řádky obrazových bodů. Zatímco u běžných plošných kamer se rozlišení uvádí jako horizontální krát vertikální počet pixelů, u řádkových kamer se udává pouze počet bodů v jedné řadě. K tomu, aby bylo možné kamerou nasnímat celý objekt, musí docházet k vzájemnému pohybu kamery a snímaného objektu. Kamera tak pracuje na podobném principu jako kancelářský skener.
Řádková kamera obsahuje snímací CCD/CMOS čip s jediným nebo několika málo řádky obrazových bodů. Zatímco u běžných plošných kamer se rozlišení uvádí jako horizontální krát vertikální počet pixelů, u řádkových kamer se udává pouze počet bodů v jedné řadě. K tomu, aby bylo možné kamerou nasnímat celý objekt, musí docházet k vzájemnému pohybu kamery a snímaného objektu. Kamera tak pracuje na podobném principu jako kancelářský skener.
Řádkové kamery lze s výhodou použít pro snímání kontinuálně se pohybujících objektů, jako jsou výrobky na běžícím pásu, odvíjející se role textilií nebo papíru, a další. Typickými úlohami jsou například:
- kontrola kvality tisku, detekce kazů a skvrn
- snímání textury a povrchových úprav a laků
- kontrola čerstvosti ovoce, luštěnin a dalších potravin
- detekce otřepů ocelových lan, textilních vláken
- kontrola potisků lahví na balicí lince
- a mnoho dalších

Příklad aplikace - kontrola pojistkového pásku

Příklad aplikace - Nasnímaný obraz z kamery
Použití řádkové kamery není vhodné tam, kde nemůžeme zajistit konstantní rychlost pohybu snímaného objektu a synchronizaci kamery. Dále pak v případech, kdy objekt provádí ještě jiné pohyby než je kontinuální pohyb vpřed, například odvalující se předměty.
 Rozlišení a rychlost snímání
Rozlišení a rychlost snímání
Na rozdíl od plošných kamer mívají řádkové kamery vyšší citlivost a jsou schopny pracovat rychlostí v řádu desítek až stovek kHz (počet snímaných řádků za sekundu). Rozlišení řádkových kamer se pohybuje v tisících pixelů (1k až 12k), takže je možné dostat obraz o extrémně vysokém rozlišení z jediného snímání. Horizontální rozlišení je dáno fyzickým rozlišením kamery, případně nastavenou oblastí zájmu (ROI). Vertikální rozlišení závisí pouze na nastaveném počtu řádků a rychlosti pohybu (pro srovnání, plošná 16 megapixelová kamera má rozlišení širší strany méně než pět tisíc bodů)
Osvětlení
Při použití klasické plošné kamery pro snímání rychle se pohybujících objektů může docházet k rozmazání obrazu vlivem dlouhé expozice. Zároveň bývá obtížné přesně navázat nasnímané obrazy přesně za sebe tak, aby nevznikaly mezery mezi jednotlivými snímky. Pokud se snímaný objekt pohybuje velmi rychle, je nutné výrazně zkrátit dobu expozice a použít silnější osvětlení nejlépe v pulzním režimu.
Při použití řádkové kamery je situace jednodušší. Místo toho, aby se intenzivně osvětlovala velká plocha jako pro plošnou kameru, stačí osvětlit pouze úzký pruh v zorném poli kamery, což výrazně šetří náklady na pořízení osvětlení. Důležité je, aby osvětlení bylo konstantní v celé šíři zorného pole. Světla jsou většinou vyráběna z LED diod. Každá dioda má trochu jinou charakteristiku, úhel vyzařování, svítivost a směr světelného toku. Světla vyráběná specializovanými firmami jsou proto přizpůsobena tak, aby bylo dosaženo rovnoměrného rozložení osvětlení. Součástí bývá často protokol s naměřenou křivkou distribuce osvitu pro konkrétní osvětlovač.
Objektiv
Všechny objektivy mají z fyzikálních důvodů největší rozlišení uprostřed zorného pole. Směrem k okrajům klesá nejen rozlišení, ale i relativní osvit, což způsobuje ztmavování obrazu při okrajích zorného pole. Zatímco u plošných kamer nám toto většinou nevadí, protože nás objekty blízko okrajů často nezajímají, tak u řádkových kamer v naprosté většině případů využíváme celého zorného pole. Proto je vhodné, aby objektivy určené pro řádkové kamery měly co nejrovnější charakteristiku MTF (modulární přenosová funkce – přímo souvisí s rozlišením a kontrastem obrazu) a relativního osvitu.
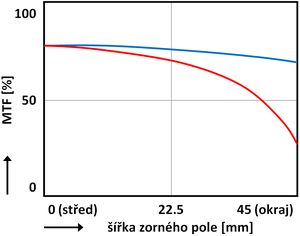
Porovnání modulární přenosové funkce (MTF) běžného objektivu (červená) a objektivu pro řádkovou kameru (modrá).
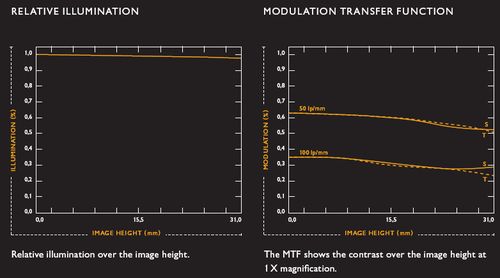
Charakteristika objektivu MACRO VARON 4.5/85mm od firmy Schneider Kreuznach pro kamery s rozlišením 12k a velikostí pixelu 5 mikronů.
Komunikační rozhraní
Většina řádkových kamer obsahuje komunikační rozhraní Camera Link nebo gigabitový ethernet. Pro velká rozlišení a vysoké rychlosti snímání je již kapacita gigabitového ethernetu nedostatečná, proto se používá rozhraní Camera Link s kapacitou až 680 MB/s. Pro toto rozhraní je potřeba zvláštní PCI karta pro sběr dat.

Karta Karbon CL pro CameraLink (Full Configuration) od firmy Bitflow
Řízení kamery
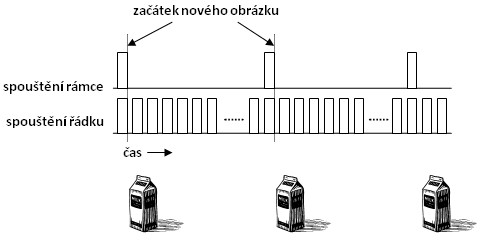
Většina řádkových kamer umožňuje nastavení všech důležitých parametrů, jako je frekvence snímání, délka expozice, oblast zájmu (ROI), nastavení režimu spouštění a další. Řádková kamera neposílá každý nasnímaný řádek zvlášť. Místo toho posílá obrazová data až po nasnímání určeného počtu řádků (rámce). Výsledný obraz lze tedy zpracovávat stejným způsobem, jako z plošné kamery. Typické způsoby spouštění kamery jsou tyto:
Volnoběžný režim: Je nastavena pevná frekvence snímání a počet řádků, po jejichž nasnímání kamera pošle obrazová data do počítače. Tento způsob se dá použít pouze v případě, kdy lze zajistit konstantní rychlost pohybu snímaného objektu. Jinak by totiž docházelo k deformacím obrazu.

Proměnlivá rychlost pohybu objektu způsobuje deformaci obrazu
Externí synchronizace: Na digitální vstupy kamery se připojí digitální čidlo nebo kvadraturní enkodér. Spouštění expozice jednotlivých řádků je řízeno pulzy z enkodéru. Tento způsob řízení kamery lze použít i v případě, kdy rychlost pohybu snímaného objektu kolísá, nebo se může měnit. Kromě spouštění každého řádku je možné využít ještě další digitální vstup kamery pro určení začátku rámce, tj. jednoho celistvého obrazu (například spuštění od přítomnosti výrobku na pásu).
Binning – slučování sousedních pixelů
Pro snímání při extrémně špatných světelných podmínkách je možno využít tzv. binning. Snímací čip se přepne do takového režimu, kdy logicky sloučí vždy dva sousední pixely, které se pak chovají jako jeden pixel s dvojnásobnou plochou. Důsledkem je zdvojnásobení citlivosti kamery a zvýšení maximální snímkovací frekvence při současném snížení rozlišení kamery na polovinu. Zorné pole se v tomto případě nezmění.

Funkce binningu a ukázka výsledného obrazu z kamery
Typy řádkových kamer
Černobílá kamera jednořádková
Toto je nejjednodušší typ řádkové kamery. Snímací čip se skládá z jediného řádku pixelů. Výhodou je jednoduchost použití a snadná synchronizace.
![]()
Kamery: Basler Runner
Černobílá dvouřádková (dual-line) kamera
Díky speciálnímu CMOS senzoru se dvěma řádky je možné zdvojnásobit snímací frekvenci (až 140 kHz) při zachování přesnosti a citlivosti kamery. Řady pixelů k sobě těsně přiléhají, takže mezi dvěma sejmutými řádky není prázdná mezera. 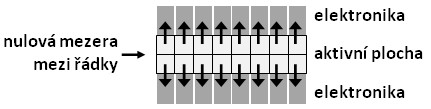
Rozložení pixelů na senzoru černobílé kamery Sprint
Například kamera Basler Sprint spL4096-140km dosahuje v jednořádkovém režimu snímací frekvence 70 kHz. Při využití obou řádků se frekvence zdvojnásobí na 140 kHz.
Černobílý senzor umožňuje pomocí binningu spojit až 4 sousední pixely:
![]()
Vertikální binning 2x1 (vlevo) a vertikální+horizontální binning 2x2 (vpravo) u kamery Basler Sprint
Kamery: Basler Sprint
Barevná jednořádková kamera
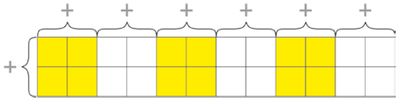
Kamera obsahuje jeden řádek pixelů, které mohou být uspořádány tak, jak je naznačeno na obrázku níže. Výhodou kamery je snadná synchronizace. Nevýhodou pak nutnost dopočítávat úplnou barevnou informaci z okolních pixelů, čímž se degraduje rozlišení kamery.
![]()
Typické uspořádání pixelů na barevné jednořádkové kameře
Barevná třířádková kamera
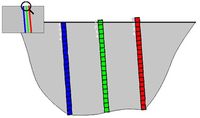
Kamera obsahuje čip se třemi řady pixelů, každou pro snímání jiné barvy RGB. Výhodou kamery je, že dokáže sejmout obraz v pravých barvách bez nutnosti interpolace. Nevýhodou je nutnost přesné synchronizace z důvodu odlišného umístění jednotlivých barevných řad na čipu. Kamera v jednom okamžiku snímá tři různé části povrchu objektu.
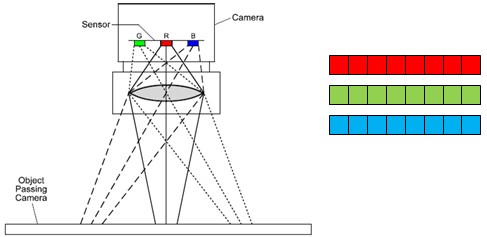
Prostorové uspořádání řádků s pixely na kameře L300
Kameru lze použít pouze pro snímání rovnoběžně se pohybujících objektů.
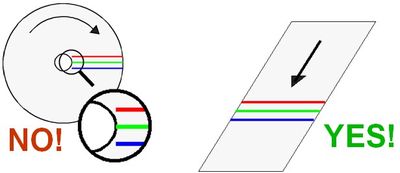
Při použití třířádkové (tri-line) kamery je důležité správné zarovnání polohy kamery s pohybujícím se objektem, jinak bude docházet k nesprávné interpretaci barev.
Protože kamera snímá každou ze tří základních barev RGB v jinou dobu (podle toho jak se pohybuje objekt) je velmi důležité správně synchronizovat sejmutí každého řádku. Při nesprávné synchronizaci může docházet k efektu posunu barev jako na následujícím obrázku. Nicméně tento efekt se dá softwarově opravit:
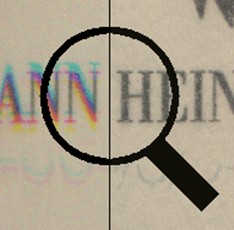
Posun barev nesprávnou synchronizací kamery
Kamery: Basler Runner, L300
Barevná dvouřádková (dual-line) kamera
Barevná varianta dvouřádkové kamery je kompromisem mezi jednořádkovou a třířádkovou kamerou. Výhodou oproti třířádkovým kamerám je nulová mezera mezi řádky. Na nasnímaný obraz se aplikuje Bayerovo kódování stejně jako na klasickou barevnou kameru (v jednom obrazovém bodě známe jednu barvu, ostatní složky se dopočítávají z okolních pixelů). Nevýhodou je drobné snížení rozlišení vyplývající právě z tohoto principu skládání barev. Kamery Basler Sprint však umožňují nastavení do režimu „vylepšených barev“ (v jednom bodě známe hodnotu dvou barev a pouze třetí se dopočítá). Při snížení rozlišení na polovinu je dokonce možná činnost i v režimu „True Color“.
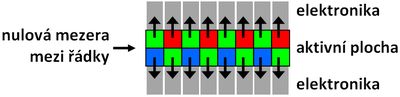
Rozložení pixelů na senzoru barevné kamery Sprint
Kamery: Basler Sprint
Barevná tříčipová (3CCD/3CMOS) kamera
Na rozdíl od třířádkové kamery obsahuje tříčipová kamera skutečně tři čipy. Přicházející světlo je na vstupu do kamery rozděleno pomocí speciálního hranolu na jednotlivé barevné složky (červená, modrá, zelená). Ty potom dopadají na CCD čipy, které jsou nalepené na stěnách hranolu. Čipy jsou přesně srovnané pixel na pixel, takže dostáváme barevnou informaci z jednoho místa v jednom čase. Velkou výhodou je výstup True color bez omezení daných třířádkovou kamerou.
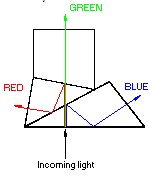

Přicházející světlo je rozdělováno pomocí optického hranolu
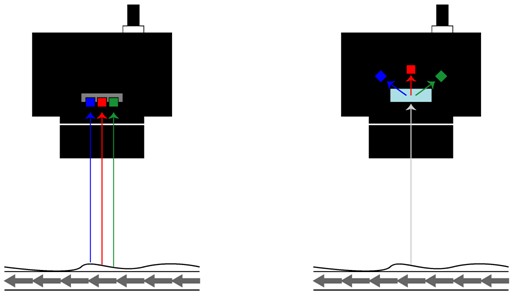
Porovnání činnosti třířádkové a 3CCD barevné kamery - 3CCD kamera snímá v jednom okamžiku jediné místo všemi barvami a nedochází tak k barevnému posunu jako u třířádkových kamer
Kamery: JAI CV-L107CL, LT-200CL, LT-400CL
Barevná čtyřčipová (4CCD) kamera
Je založena na stejné technologii jako 3CCD kamera s tím, že ke třem barevným složkám RGB je přidána ještě možnost snímání v blízké infračervené části spektra (NIR).
Kamery: JAI LQ-200CL
Závěr
Seznam typů kamer není úplný, existují ještě například čtyř řádkové kamery, nebo 5CCD kamery, které jsou však již jen rozšířením stávajících technologií a obvykle přidávají možnost snímání v rozšířené části spektra.
Pro podrobnější informace nejen o řádkových kamerách nás kontaktujte na telefonním čísle +420 558 279 948 nebo prostřednictvím kontaktního formuláře.



